

|
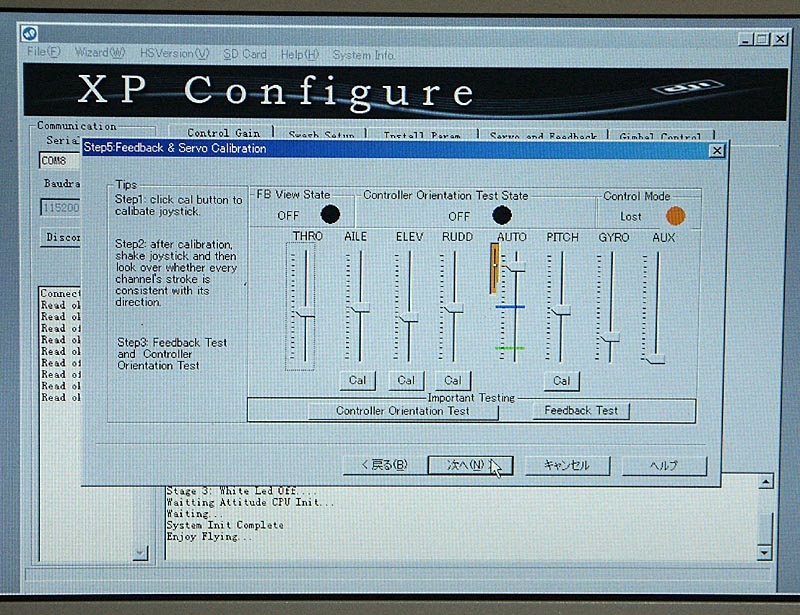
サーボキャリブレーション1 今までの過程で送信機の各スティックと機体のサーボ等の動きが同調しました 次に送信機スティックと装置の同調をとります黄矢印のボタンをクリックし 画面の指示に従って進みます |
|
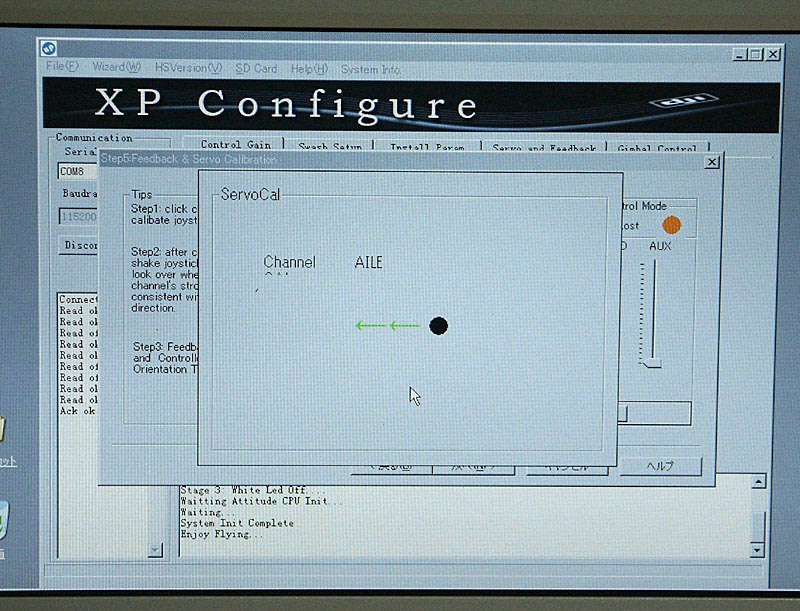
サーボキャリブレーション2 エルロン、エレベーター、ラダー、ピッチの各キャリブレーションボタンをクリックします 左写真の緑の矢印が出ます 矢印の向きに合わせスティックを一杯に操作します 次にニュートラルにするように矢印が出ます スティックをニュートラルにします 今度は反対方向に矢印がでます スティックを一杯に操作します 最後にニュートラルにするよう矢印がでます スティックをニュートラルに戻します 以上の操作を各チャンネルごとに行い終了です |
|
フィードバックテスト 3ポジションスイッチをGPSオートモードに切り換えて一番上の写真”赤矢印”の ”フィードバックテスト”ボタンをクリックします 左のビデオのように自動的に動くことを確認します ピッチ、エレベーター、エルロン、ラダー、スロットルの順番で一往復します |
|
コントローラーオリエンテーションテスト ”赤矢印”の”コントローラーオリエンテーションテスト”ボタンをクリックします 左ビデオのように機体を前後、左右に傾けます その時スワッシュプレートが 機体の傾きと反対方向に傾斜することを確認します これで"Wizard"の終了ですあとは各舵の感度設定を行い飛行調整に進みます |
|
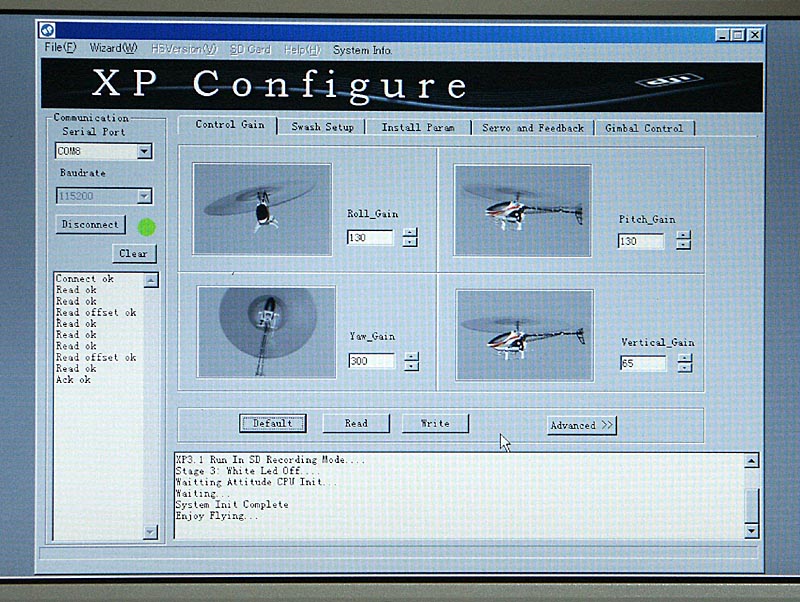
各舵の感度設定 エルロン、エレベータ、ラダー及び上下方向の感度を設定します この調整は通常のラダージャイロの設定と同じに考えて問題はありません 機体の傾き、機首偏向、高度偏移の復元量です ハンチングが出る数値から 少しずつ減らしていきます 最初は赤矢印の”Default”をクリックそして”Write”をクリックし初期設定値を装置に書き込みます これでコンピューターでの基本設定は終わりです |
DJIXP3.1JRボイジャー
Copyright (C) 2003 Tyuubu_Tokusha. All Rights Reserved.